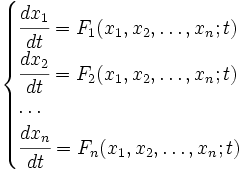
En un sistema de ecuaciones diferenciales ordinarias de cualquier orden, puede ser reducido a un sistema equivalente de primer orden, si se introducen nuevas variables y ecuaciones. Por esa razón en este artículo sólo se consideran sistemas de ecuaciones de primer orden. Un sistema de ecuaciones diferenciales ordinarias de primer orden escrito en forma explícita es un sistema de ecuaciones de la forma:
Reducción a un sistema de primer orden
Dado un sistema de ecuaciones diferenciales de orden n con m ecuaciones:
Existe un sistema equivalente de primer orden con a lo sumo (n+1)xm ecuaciones. Para ver esto consideremos un sistema en que intervienen m funciones incógnitas xi y sus n derivadas, e introduzcamos un nuevo conjunto de variables yi,k definidos de la siguiente manera:

El sistema de primer orden equivalente en las variables yi,k resulta ser:

Como ejemplo de reducción de un sistema de ecuaciones diferenciales podemos considerar las ecuaciones de movimiento de la mecánica newtoniana de una partícula que es un sistema de segundo orden con tres ecuaciones:

Si se introducen tres funciones incógnita nuevas que representan la velocidad, el sistema anterior se puede reducir a un sistema de primer orden y seis ecuaciones:


No hay comentarios:
Publicar un comentario